This line follower robot was designed and constructed in 2011.
This robot was designed, first for fun and learn a bit more in this amazing world of electronics but the main goal was to take part in the Spanish Robotic League event (lnrc.es) on the same year. Although, only the 3kg sumo robot was finished on time.

Goals
The main task of this “line follower” is to follow a black line track drawn on a white floor as fast as possible.
2 robots were placed on counterparts of a track. They start at the same time following the track in closed loop. The robot which catches the other one wins. Also, it can be done with 2 parallel tracks or as timed competition
You can see an example video of a competition:
httpv://www.youtube.com/watch?v=WwA762dxJE4
Some features of this robot:
- PCB-structure. No additional structural materials were used.
- The microcontroller was a PIC18 (F4550)
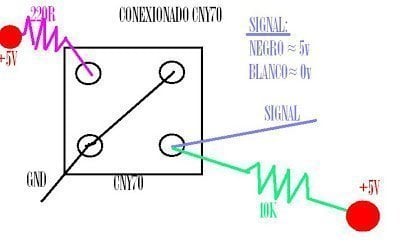
- 8 CNY70 sensors
Some Characteristics
The robot was constructed directly with the PCB used as a structure. So 2 PCBs were designed: The control and sensor board.
The reasons to slipt the design in 2:
- I was able to fabricate only one-sided PCBs
- For miniaturization reasons, the CNY70 infrared sensors were smd. So, the sensors need to face down and the other components of the control board have to be placed on the top. Today, I would simply design a 2-sided board, but at that time I had limited access to resources.
Both PCBs were fabricated with help of a CNC drilling machine.
The sensor board has 8 CNY70 sensors to detect the black line over the white background.
The main schematic
You can see more details about the construction on the schematics below:





The Final Version






Could you please share the pcb files and source code?
Hello Mohamed, I think i dont have them any more, since I built the robot on 2010 🙁 Sorry!
Best Regards
Sir can we purchase this bot 🤔